
로보틱스는 사람들에게 프로그래밍을 소개하는 흥미로운 방법이지만 비용이 많이 들 뿐만 아니라 초보자가 이해하기가 약간 어려울 수도 있습니다.
누구나 쉽게 제작할 수 있고 비용 효율적인 로봇을 만들 수 있도록 하는 것은 학습에서 중요한 단계입니다. 그래서 이 튜토리얼에서 우리는 우리만의 로봇을 만들고 누구나 제어할 수 있는 Python 3 라이브러리를 만들 것입니다.
이 프로젝트에는 다음이 필요합니다. Raspberry Pi의 모든 모델; Raspbian , Wi-Fi 동글 및 Raspberry Pi를 홈 라우터에 연결합니다. USB 배터리 팩, 로봇 섀시 키트 (새 탭에서 열림) , L298N 모터 컨트롤러 (새 탭에서 열림) ; 4개의 AA 배터리와 일부 Blu-tack.
로봇 섀시를 구축하는 것은 훌륭한 활동이며 키트(위에서 언급)에는 시작하는 데 필요한 모든 것이 포함되어 있습니다. 빨간색과 검은색 전선을 모터 단자에 납땜해야 합니다. 납땜할 수 없다면 지금이 친구에게 배울 수 있는 좋은 시간입니다.
납땜
이 프로젝트에서 우리는 eBay에서 2개의 DC 모터가 포함된 로봇 섀시 키트를 구입했습니다. 이 모터는 조립된 상태로 제공되지만 전원 공급을 위해 두 개의 와이어를 단자에 납땜해야 합니다. 납땜은 제작자에게 필수적인 기술이며 배우기도 정말 쉽습니다. 하지만 젊은 납땜 지망자에게는 성인의 감독이 필수적입니다.
많은 YouTube 튜토리얼 비디오가 있지만 가장 좋은 것은 Carrie Anne Philbin(아래)입니다.
납땜 인두 세트는 약 10파운드에 구입할 수 있지만 좋은 예는 중간 납땜 인두에 대한 훌륭한 스타터인 약 25파운드에 Antex XS25입니다.
작업 공간이 넓고 환기가 잘 되는 넓은 공간에서 납땜을 수행해야 합니다. 납땜은 매우 재미있고 지역 해킹 공간/LUG는 안전한 방식으로 학습하는 데 도움이 될 수 있습니다.
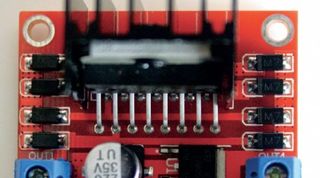
섀시가 구축되면 이제 L298N H 브리지 컨트롤러인 모터 컨트롤러에 초점을 맞춥니다. H 브리지를 사용하면 모터가 앞뒤로 이동할 수 있습니다. L298N에는 모터용 두 개의 출력이 있으며 왼쪽은 OUT1과 2, 오른쪽은 OUT3과 4가 제공합니다.
모터의 와이어를 이 단자에 연결하고 고정되었는지 확인하십시오. 당사의 AA 배터리 팩은 +12V 및 GND 단자에 연결됩니다.
또한 Raspberry Pi의 GND 중 하나를 L298N GND 터미널에 연결해야 합니다. L298N에서 IN1에서 IN4로 표시된 4개의 핀을 볼 수 있습니다. L298N을 Raspberry Pi GPIO(범용 입력 출력) 핀에 연결하는 데 사용하는 입력입니다.
GPIO 핀을 켜거나 꺼서 그에 따라 입력 핀을 트리거하고 모터 방향을 제어할 수 있습니다. 입력을 다음 GPIO 핀에 연결했습니다: IN1에서 17, IN2에서 22, IN3에서 18, IN4에서 23. 우리는 Raspberry Pi Foundation에서 설정한 표준인 Broadcom 핀 매핑을 사용했습니다.
Broadcom 핀 매핑을 설명하는 GPIO에 대한 이 훌륭한 참고 자료를 확인하십시오 .
- Raspberry Pi 프로젝트 컬렉션을 통해 작은 PC로 무엇을 할 수 있는지 알아보십시오.